A key constraint facing flying robots is their energy and computational constraints. We are interested in improving the power consumption and efficiency of the systems, to allow them to achieve more on a given energy budget. We have looked at optimizing a vehicle’s trajectory online, in response to its in-flight energy consumption — specifically, without requiring any model knowledge, we have demonstrated how an aerial system can automatically find the optimal airspeed to fly at under different (unknown) payloads.
By radically re-considering what a UAV is, we have also been able to create systems with radically improved endurance. An irony of battery powered UAVs is that, beyond a certain point, adding more battery to a vehicle actually reduces its flight time. This is because the vehicle’s weight is unchanged as the battery is discharged, and the benefit from the larger energy capacity is more than overcome by the downside of the increased consumption required to lift the battery. We have looked at creating a system of robots, that can mid-air replenish batteries, and thereby achieve flight times that are impossible for normal UAVs:
Another, more radical approach is to discard the battery as it is discharged, solving the problem of carrying a depleted battery’s dead mass. This obviously only makes sense as a proof of concept, or in extreme scenarios, as there would be significant environmental concerns otherwise.
During flight, a standard UAV can typically accomplish its mission at varying flight conditions (e.g. speeds and yaw angles). We are working on algorithms that allow a vehicle to adapt its flight configuration in-flight, to continuously maximize efficiency. This is especially useful for systems that carry payloads, where the payload characteristics (size, shape, mass) vary from one flight to the next.
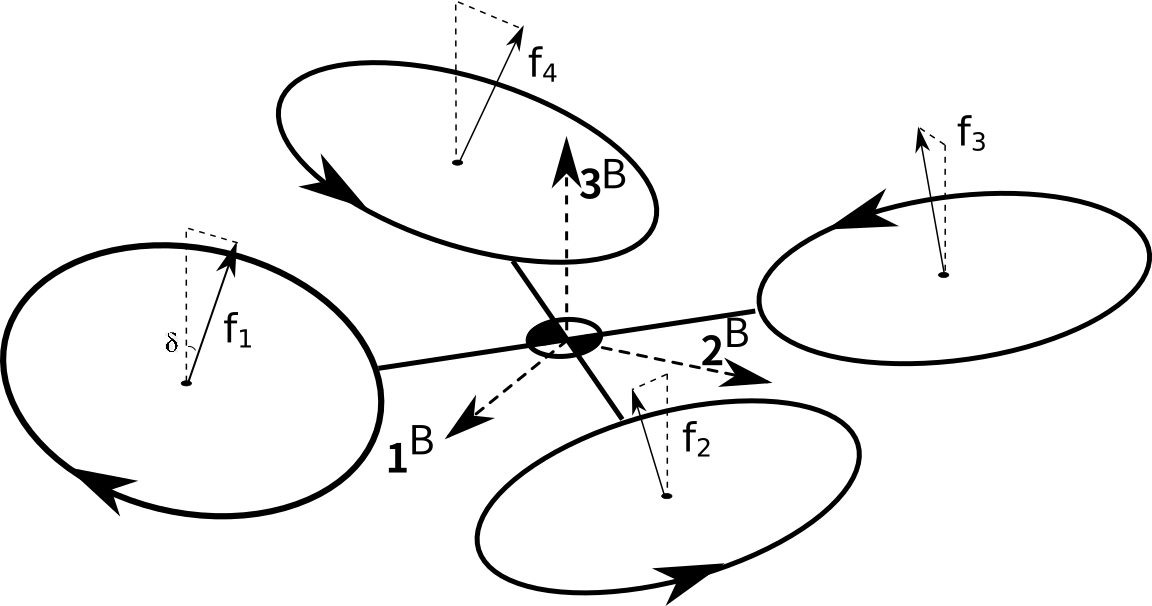
The mechanical design of the vehicle is of course crucially important for power consumption. We have shown that, perhaps surprisingly, tilting the vehicle’s propellers away from the common thrust direction can lead to improvements in total power consumption: this is because the vehicle gains control authority about its yaw axis, leading to less energy needing to be spent to reject disturbances.